מנועי צעד מסוג Nema 23 (57 מ"מ) בלולאה סגורה

>> תיאורים קצרים
| סוג מנוע | סטפר דו קוטבי |
| זווית צעד | 1.8 מעלות |
| מתח (V) | 2.6 / 3.6 / 4.1 |
| נוכחי (א) | 3/4/5 |
| התנגדות (אוהם) | 0.86 / 0.9 / 0.81 |
| השראות (mH) | 2.6 / 4.5 / 4.6 |
| חוטי עופרת | 4 |
| מומנט אחיזה (Nm) | 1 / 1.8 / 3 |
| אורך מנוע (מ"מ) | 55/75/112 |
| קוֹדַאִי | 1000 CPR |
| טמפרטורת סביבה | -20℃ ~ +50℃ |
| עליה בטמפרטורות | מקסימום 80K |
| חוזק דיאלקטרי | 1mA מקסימום.@ 500V, 1KHz, 1 שניות |
| התנגדות בידוד | 100MΩ דקות@500Vdc |
>> תיאורים
Pביצועים
קיבולת עומס גדולה, עליית טמפרטורה נמוכה, רטט קטן, רעש נמוך, מהירות מהירה, תגובה מהירה, פעולה חלקה, חיים ארוכים, דיוק מיקום גבוה (עד ±0.005 מ"מ)
Aיישום
ציוד אבחון רפואי, מכשירי מדעי החיים, רובוטים, ציוד לייזר, מכשירי ניתוח, ציוד מוליכים למחצה, ציוד ייצור אלקטרוני, ציוד אוטומציה לא סטנדרטי וסוגים שונים של ציוד אוטומציה
>> אישורים

>> פרמטרים חשמליים
| גודל מנוע | מתח/ שלב (V) | נוֹכְחִי/ שלב (א) | הִתנַגְדוּת/ שלב (Ω) | הַשׁרָאוּת/ שלב (mH) | מספר של חוטי עופרת | אינרציה של הרוטור (g.cm2) | מומנט מחזיק (Nm) | אורך מנוע L (מ"מ) |
| 57 | 2.6 | 3 | 0.86 | 2.6 | 4 | 300 | 1 | 55 |
| 57 | 3.6 | 4 | 0.9 | 4.5 | 4 | 480 | 1.8 | 75 |
| 57 | 4.1 | 5 | 0.81 | 4.6 | 4 | 800 | 3 | 112 |
>> פרמטרים טכניים כלליים
| מרווח רדיאלי | 0.02 מ"מ מקסימום (עומס של 450 גרם) | עמידות בידוד | 100MΩ @500VDC |
| מרווח צירי | 0.08 מ"מ מקסימום (עומס של 450 גרם) | חוזק דיאלקטרי | 500VAC, 1mA, 1s@1KHZ |
| עומס רדיאלי מרבי | 70N (20 מ"מ ממשטח האוגן) | כיתת בידוד | Class B (80K) |
| עומס צירי מרבי | 15N | טמפרטורת הסביבה | -20℃ ~ +50℃ |
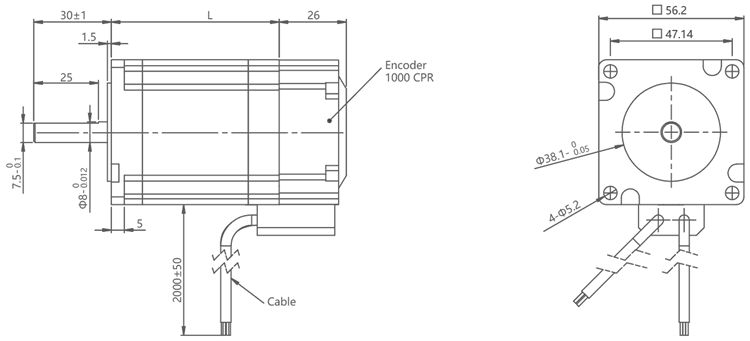
>> ציור מתאר מנוע 57IHS2XX-X-4A
| תצורת סיכה (הפרש) | ||
| פִּין | תיאור | צֶבַע |
| 1 | +5V | אָדוֹם |
| 2 | GND | לבן |
| 3 | A+ | שָׁחוֹר |
| 4 | A- | כָּחוֹל |
| 5 | B+ | צהוב |
| 6 | B- | ירוק |





