מנוע צעד Nema 34 (86 מ"מ).
>> תיאורים קצרים
| סוג מנוע | סטפר דו קוטבי |
| זווית צעד | 1.8 מעלות |
| מתח (V) | 2.8 / 3 / 3.9 / 4.8 / 5.4 / 6 |
| נוכחי (א) | 6 |
| התנגדות (אוהם) | 0.4 / 0.5 / 0.65 / 0.8 / 0.9 / 1 |
| השראות (mH) | 2.2 / 4 / 5.4 / 8 / 9 / 11.5 |
| חוטי עופרת | 4 |
| מומנט אחיזה (Nm) | 3.5 / 4.5 / 7 / 8.5 / 10 / 12 |
| אורך מנוע (מ"מ) | 65 / 76 / 98 / 114 / 128 / 152 |
| טמפרטורת סביבה | -20℃ ~ +50℃ |
| עליה בטמפרטורות | מקסימום 80K |
| חוזק דיאלקטרי | 1mA מקסימום.@ 500V, 1KHz, 1 שניות |
| התנגדות בידוד | 100MΩ דקות@500Vdc |
מנוע צעד סיבובי משמש בדרך כלל ביישומים הדורשים תנועת סיבוב מדויקת, כגון ציוד רפואי, מוליכים למחצה, אוטומציה תעשייתית, טקסטיל, מכשיר מדעי וכו'.
ThinkerMotion מציעה מגוון רחב של מנוע צעד סיבובי (NEMA 8, NEMA11, NEMA14, NEMA17, NEMA23, NEMA24, NEMA34) עם מומנט החזקה מ-0.02Nm עד 12N.m.ניתן לעבד התאמות אישיות לפי בקשה, כגון הארכת פיר בודד/כפול, עיבוד קצה פיר, בלם מגנטי, מקודד, תיבת הילוכים וכו'.
>> אישורים

>> פרמטרים חשמליים
| גודל מנוע | מתח/ שלב (V) | נוֹכְחִי/ שלב (א) | הִתנַגְדוּת/ שלב (Ω) | הַשׁרָאוּת/ שלב (mH) | מספר של חוטי עופרת | אינרציה של הרוטור (g.cm2) | מומנט מחזיק (Nm) | אורך מנוע L (מ"מ) |
| 86 | 2.8 | 6 | 0.4 | 2.2 | 4 | 1000 | 3.5 | 65 |
| 86 | 3 | 6 | 0.5 | 4 | 4 | 1300 | 4.5 | 76 |
| 86 | 3.9 | 6 | 0.65 | 5.4 | 4 | 2100 | 7 | 98 |
| 86 | 4.8 | 6 | 0.8 | 8 | 4 | 2500 | 8.5 | 114 |
| 86 | 5.4 | 6 | 0.9 | 9 | 4 | 3200 | 10 | 128 |
| 86 | 6 | 6 | 1 | 11.5 | 4 | 4000 | 12 | 152 |
>> פרמטרים טכניים כלליים
| מרווח רדיאלי | 0.02 מ"מ מקסימום (עומס של 450 גרם) | עמידות בידוד | 100MΩ @500VDC |
| מרווח צירי | 0.08 מ"מ מקסימום (עומס של 450 גרם) | חוזק דיאלקטרי | 500VAC, 1mA, 1s@1KHZ |
| עומס רדיאלי מרבי | 200N (20 מ"מ ממשטח האוגן) | כיתת בידוד | Class B (80K) |
| עומס צירי מרבי | 50N | טמפרטורת הסביבה | -20℃ ~ +50℃ |
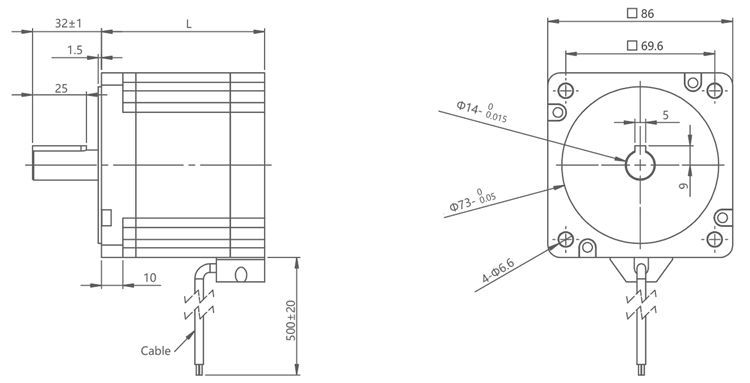
>> ציור מתאר מנוע 86HS2XX-6-4A
>> עקומת מומנט-תדר
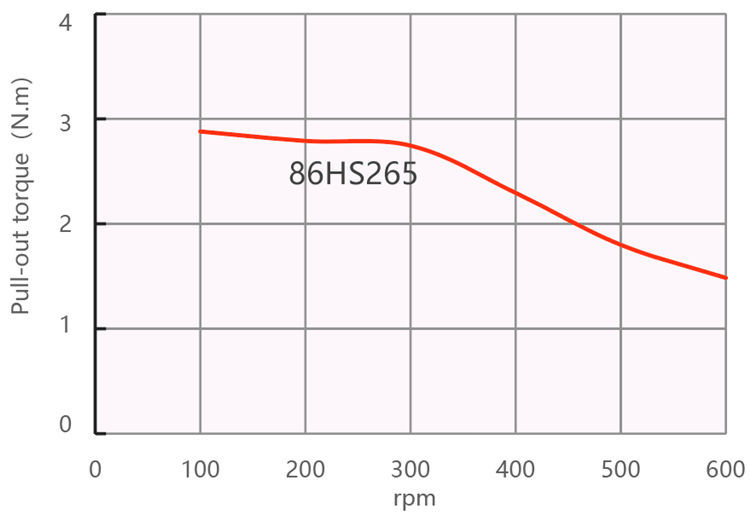
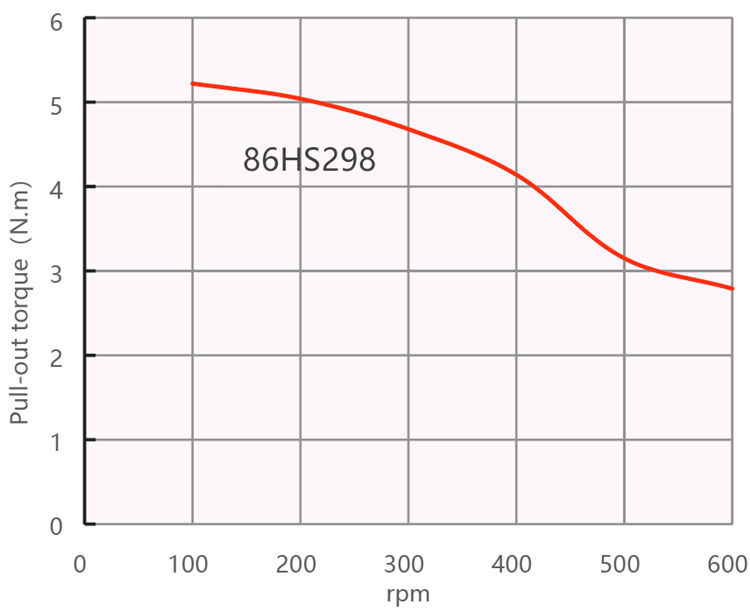
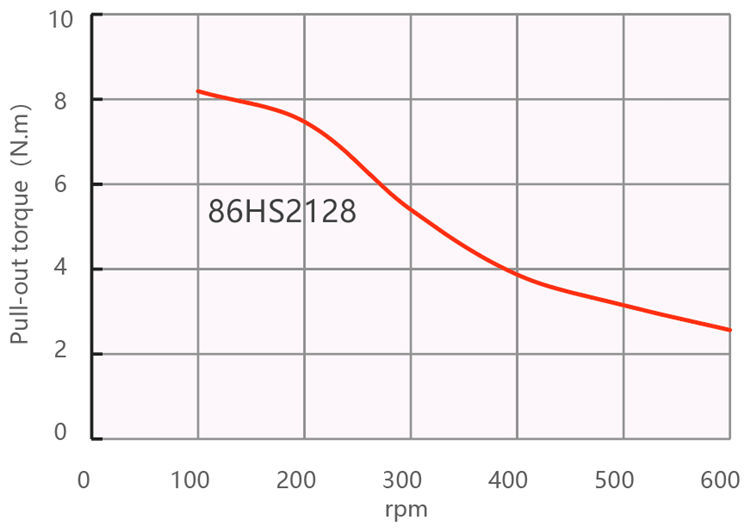
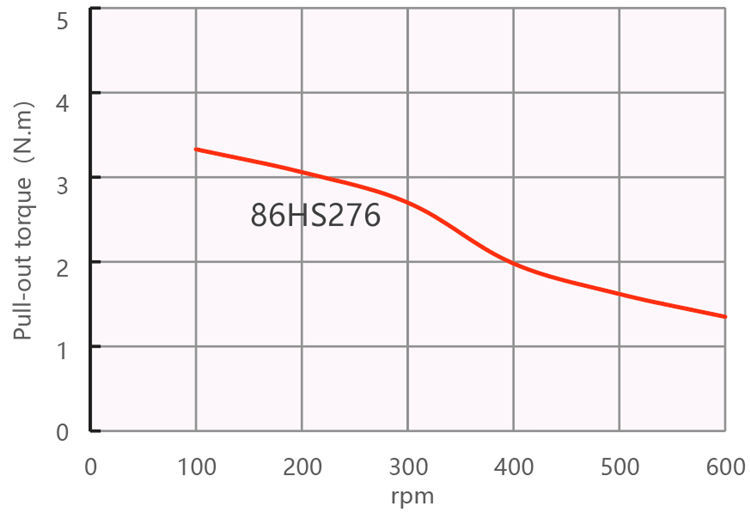
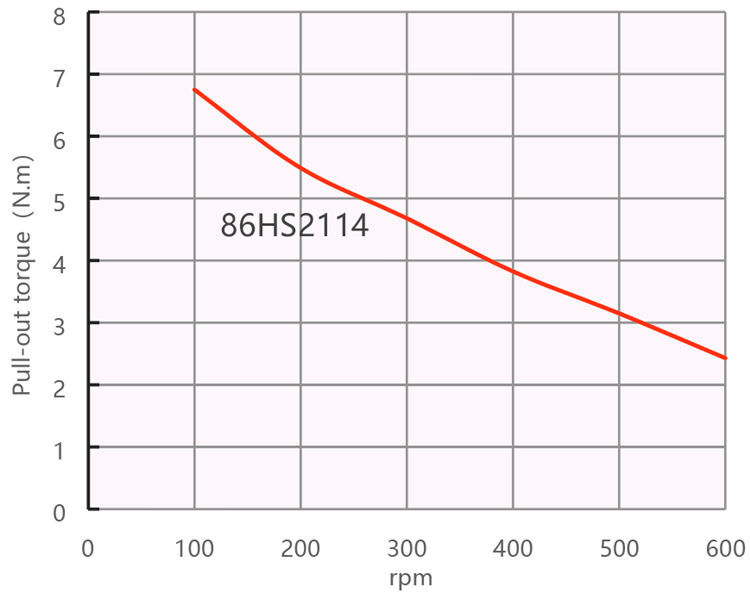
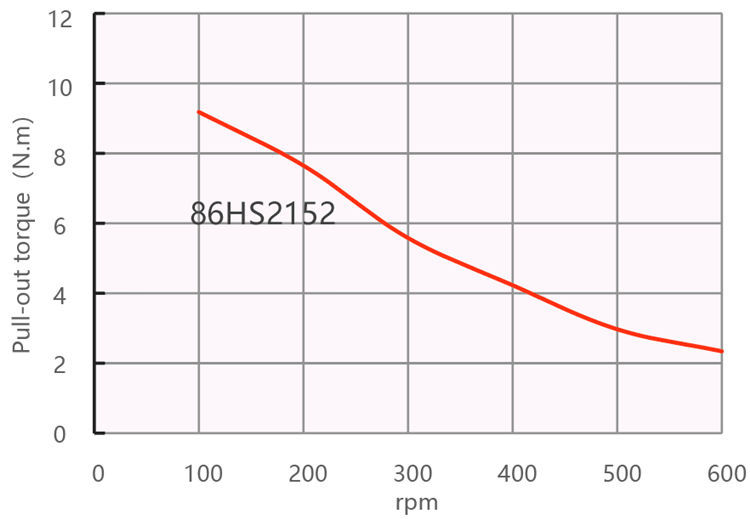
מצב בדיקה:
כונן צ'ופר, חצי מיקרו צעדים, מתח הנעה 40V